|
PROJECT OVERVIEW
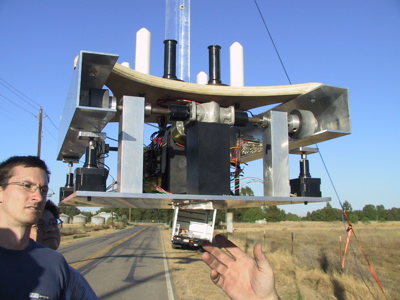
A laser-based non-intrusive detection system for real-time measurement of delineations of moving vehicles on a highway has been developed through the California Partners for Advanced Transit and Highways (PATH) program. Speed, as well as, the general shape of vehicles on the roadway can be measured using this prototype for the further development of Intelligent Transportation System (ITS). The laser-based detection system is designed to work above a highway lane.
|
|
In operation, the detector must be moved from one lane to another, as well as, be kept at a desired position over a lane, which may require regular adjustment of the detector’s position. CalTrans workers have to install and adjust the traffic detection system above traffic, creating a potentially hazardous working environment. And with a person over traffic, some or all lanes of traffic would most likely need to be closed. This is an encumbrance that takes time and money, not to mention the burden on the driving public.
|

|
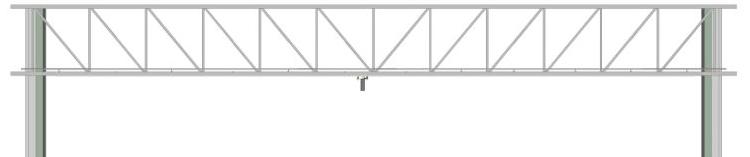
To prevent a California Department of Transportation (CalTrans) worker from having to work above traffic, a universal mobile platform has been developed with support from CalTrans to carry the detector to any desired position over traffic. The major components of the platform are a motorized trolley and set of tracks for it to ride on that span the freeway. The trolley would be wheeled into position over the correct lane of traffic via remote control. Raising and lowering the trolley to the tracks would be done from the side of the freeway, preventing the hazardous working situation mentioned above.
|
Click a link above to find out more about the trolley project.
|

|